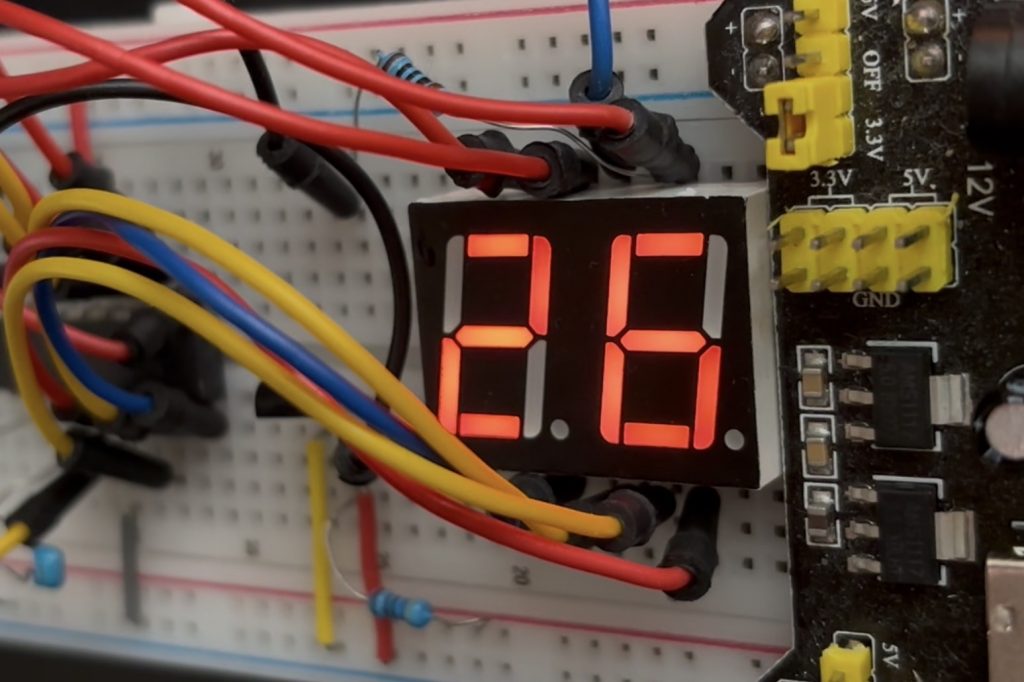
Hello, the much loved Seven Segment Digital Thermometer has been improved upon! This is version 2.0 of TINY Therm. It basically improves its brightness and by driving the display directly from the power rails using 2 transistors. I’ve also included a button so that it will stay asleep and only wake to show the temperature when pressed, then go back to sleep, conserving battery power. This will allow 3 AAA batteries to last for years without changing them! This is a nice bright display now so that it is much better than unlit lcds on the market that are hard to see from afar!
So let’s dive straight in. I’m going to emit most of what was spoken about in the previous post regarding this product. Instead I’m going to just dive straight in and give you the schematics, gerber and drill files to upload direct to JLCPCB.com, and the components Bill of materials list. I’ll also give you the assembly language code here too.
I’ll update here with a 3D Print file of a nice casing for it when I get the first prototype PCB’s back to populate myself and demo here.
The schematic looks like this:
Components bill of materials list:
You can buy most of these from AliExpress, Amazon or eBay for pennies. Please support my blog by purchasing from these links below:
- PIC16F628 04/P (ensure its the 4 Mhz version, denoted by the 04/P)
- Dual 7 Segment Display (common anode). Not common cathode.
- DS18B20 (also on Amazon)
- 0.1uF ceramic capacitor, a few resistors per the schematic (bought in one assortment pack)
- New components for vs 2.0: 2 x 2N3906 transistors
Now, the assembly language code to flash the pic with can be seen here. I used MPLab 8.92 as that’s the latest version on windows that uses mpasm before they upgraded to MPLab X. I much prefer the old mpasm as it’s much simpler and usable for product design.
;**********************************************************************
; This file is a basic code template for object module code *
; generation on the PIC16F628. This file contains the *
; basic code building blocks to build upon. As a project minimum *
; the 16F628.lkr file will also be required for this file to *
; correctly build. The .lkr files are located in the MPLAB *
; directory. *
; *
; If interrupts are not used all code presented between the *
; code section "INT_VECTOR and code section "MAIN" can be removed. *
; In addition the variable assignments for 'w_temp' and *
; 'status_temp' can be removed. *
; *
; If interrupts are used, as in this template file, the 16F628.lkr *
; file will need to be modified. Refer to the readme.tmp file for *
; this information. *
; *
; Refer to the MPASM User's Guide for additional information on *
; features of the assembler and linker (Document DS33014F). *
; *
; Refer to the respective PIC data sheet for additional *
; information on the instruction set. *
; *
; Template file built using MPLAB V4.00 with MPASM V2.20.12 and *
; MPLINK 1.20.10 as the language tools. *
; *
;**********************************************************************
; *
; Filename: xxx.asm *
; Date: *
; File Version: *
; *
; Author: *
; Company: *
; *
; *
;**********************************************************************
; *
; Files required: *
; *
; *
; *
;**********************************************************************
; *
; Notes: *
; *
; *
; *
; *
;**********************************************************************
list p=16f628 ; list directive to define processor
#include <p16f628.inc> ; processor specific variable definitions
__CONFIG _CP_OFF&_BODEN_OFF&_PWRTE_ON&_WDT_OFF&_LVP_OFF&_MCLRE_OFF&_INTRC_OSC_NOCLKOUT
; PWRTE_ON enables power up timer delay ~72ms which should help screen to self initialise
; '__CONFIG' directive is used to embed configuration data within .asm file.
; The labels following the directive are located in the respective .inc file.
; See respective data sheet for additional information on configuration word.
;***** VARIABLE DEFINITIONS (examples)
; example of using Shared Uninitialized Data Section
INT_VAR UDATA_SHR
w_temp RES 1 ; variable used for context saving
status_temp RES 1 ; variable used for context saving
; example of using Uninitialized Data Section
TEMP_VAR UDATA 0x20 ; explicit address specified is not required
temp_count RES 1 ; temporary variable (example)
; example of using Overlayed Uninitialized Data Section
; in this example both variables are assigned the same GPR location by linker
G_DATA UDATA_OVR ; explicit address can be specified
flag RES 1 ; temporary variable (shared locations - G_DATA)
G_DATA UDATA_OVR
count RES 1 ; temporary variable (shared locations - G_DATA)
;**********************************************************************
RESET_VECTOR CODE 0x000 ; processor reset vector
goto start ; go to beginning of program
INT_VECTOR CODE 0x004 ; interrupt vector location
goto INTERRUPT
MAIN CODE
;===========================================================
; Lookup table (0 = ON, common anode)
;===========================================================
DigitToSeg
ADDWF PCL,F
RETLW b'00000001' ; 0
RETLW b'01010111' ; 1
RETLW b'01001000' ; 2
RETLW b'01000100' ; 3
RETLW b'00010110' ; 4
RETLW b'00100100' ; 5
RETLW b'00100000' ; 6
RETLW b'01000111' ; 7
RETLW b'00000000' ; 8
RETLW b'00000110' ; 9
INTERRUPT
retfie
LOOP EQU 0X20 ;DELAY LOOP
LOOP1 EQU 0X21 ;DELAY LOOP
COUNT EQU 0X22
O_BYTE EQU 0X23
I_BYTE EQU 0X24
FLAGS EQU 0X25
CALC_CRC EQU 0X26 ;CALCULATED CRC
BCOUNT EQU 0X27
TEMP1 EQU 0X28 ;TEMP MEMORY DURING CALC_CRC
TEMP2 EQU 0X29 ;TEMP MEMORY DURING CALC_CRC
;SCRATCHPAD IS READ INTO 0X2A - 0X32
TEMP_LSB EQU 0X2A
TEMP_MSB EQU 0X2B
TH EQU 0X2C
TL EQU 0X2D
RES1 EQU 0X2E
RES2 EQU 0X2F
C_REMAIN EQU 0X30
C_PERC EQU 0X31
CRC EQU 0X32
UNITS equ 0x38
TENS equ 0x39
;pats variables
count1 equ 0x40 ;used in delay routine
counta equ 0x41 ;used in delay routine
countb equ 0x42 ;used in delay routine
SUBCHECK equ 0x43
counter equ 0x44 ;used in 2 digit display routine to switch between the two digits many times before exiting the loop so that the user can get some time to view the digits
SEGIT equ 0x45
SEGIT2 equ 0x46
SAVEWR EQU 0X47
FILE1 equ 0x48
FILE2 equ 0x49
FILE3 equ 0x50
TENS_Split equ 0x51
UNITS_Split equ 0x52
TEMP equ 0x53
CombinedByte equ 0x54
LSB_Sanitise equ 0x55
MSB_Sanitise equ 0x56
temp equ 0x57
TENS_AGAIN equ 0x58
UNITS_AGAIN equ 0x59
;FLAGS BITS
PRESENCE EQU .0 ;PRESENCE
DS_ERROR EQU .1 ;CRC ERROR
;DS1820 BITS
DQ_BIT EQU 0
#DEFINE DQ PORTA,DQ_BIT
#DEFINE TRIS_DQ TRISA,DQ_BIT
start ;Reset vector
goto START_OF_PROG
INITIALISE
movlw 0x07
movwf CMCON ; turn off comparitors so can use porta as digital i/o
clrf PORTB
bsf STATUS,RP0 ; Change to bank 1
movlw b'00000000' ; Set PORTB as digital output
movwf TRISB ; Set data / control lines to Output
movlw b'00000000'
movwf TRISA ; Set PORTA as an output, but the DQ line will need to be both input and output at different times, which is toggled later in the program for the DS18B20 to communicate effectively
bcf STATUS,RP0 ; Go back to bank 0
bsf PORTA, 0 ; Ensure RA0 high initially (bus idles high via pull-up) as per ChatGPT suggestion
;setting up the timer0 function for isr NO LONGER NEEDED AS USING PCL
return
START_OF_PROG
call INITIALISE ; Set up port and screen
nop ; not actually needed but gives me somewhere to RUN TO or insert BREAK
; LCD_STRING hello_world ; Use Macro to send string from lookup table to LCD
nop ; not actually needed but gives me somewhere to RUN TO or insert BREAK
; LCD_STRING user_defs ; Define "graphics" characters
nop ; not actually needed but gives me somewhere to RUN TO or insert BREAK
Gogo
;call convert
;movlw .25
;bcf STATUS, Z
;subwf TEMP_LSB, 1
;BTFSS STATUS,Z
;call temp_low
;btfsc STATUS, Z
;call temp_high
;call display
BCF INTCON, GIE ; disable all interrupts
call READ_SCRATCHPAD
call SEGGY
goto Gogo
;*******************************************************************************************
READ_SCRATCHPAD
;READ SCRATCHPAD, CHECK PRESENCE & CRC
BCF FLAGS,DS_ERROR
CALL DS_RESET ;THIS IS THE INITIALIZATION ROUTINE
BTFSS FLAGS,PRESENCE
RETURN ;NOT PRESENT
MOVLW 0XCC ;SKIP ROM. THIS MEANS THE FOLLOWING COMMAND WILL ADDRESS ALL SLAVES ON THE LINE.
CALL OUT_BYTE
MOVLW 0X44 ;CONVERT TEMP
CALL OUT_BYTE
CALL PASSIVE_WAIT_CONVERSION ;WAITS WHILE DS18S20 CONVERTS TEMPERATURE A-D
; CALL WAIT_CONVERSION ;CAN BE LONG _ DO OTHER THINGS?
CALL DS_RESET
BTFSS FLAGS,PRESENCE
RETURN ;NOT PRESENT
MOVLW 0XCC ;SKIP ROM
CALL OUT_BYTE
MOVLW 0XBE ;READ SCRATCHPAD
CALL OUT_BYTE
CLRF CALC_CRC
MOVLW TEMP_LSB ;ADDRESS TO STORE TEMP_LSB
MOVWF FSR
MOVLW .9 ;READ 9 BYTES FROM SCRATCHPAD
MOVWF BCOUNT
NEXT_CODE
CALL IN_BYTE
MOVWF INDF
MOVWF TEMP1
MOVLW .8
MOVWF COUNT ;8 BITS PER BYTE
INCF FSR,F
DECFSZ BCOUNT,F
GOTO DO_CRC
MOVF TEMP1,W
SUBWF CALC_CRC,W ;Z WILL BE SET IF CRC CORRECT
BTFSS STATUS,Z
BSF FLAGS,DS_ERROR ;CRC WAS NOT CORRECT
RETURN
DO_CRC
MOVF CALC_CRC,W
XORWF TEMP1,W
MOVWF TEMP2 ;STORE IN TEMP LOCATION THAT CAN BE ROTATED INTO C
RRF TEMP1,F ;ROTATE DATA READY FOR NEXT BIT
RRF TEMP2,W
BTFSS STATUS,C
GOTO NO_CARRY
MOVLW 0X18
XORWF CALC_CRC,F
NO_CARRY
RRF CALC_CRC,F
DECFSZ COUNT,F
GOTO DO_CRC
GOTO NEXT_CODE
;-----------------------------------------------------
DS_RESET
; RESET DS1820 _ CHECK FOR PRESENCE PULSE!
BCF FLAGS,PRESENCE
CALL PIN_LO
MOVLW .48
CALL DELAY_10US ;48 X 10US ~480US
CALL PIN_HI
MOVLW .6
CALL DELAY_10US ;6 X 10US ~60US
BTFSS DQ ;CHECK PRESENCE PULSE
BSF FLAGS,PRESENCE ;PRESENT
MOVLW .42
CALL DELAY_10US ;42 X 10US ~420US
RETURN
;------------------------------------------------------
PIN_LO
BCF DQ ;SET DATA PIN LOW, DO ONCE INITIALLY ?
BSF STATUS,RP0 ;SAFEST THIS WAY _ OTHER CODE MAY ACCIDENTLY CHANGE DQ?
BCF TRIS_DQ ;SET DATA PIN AS OUTPUT
BCF STATUS,RP0
RETURN
;------------------------------------------------------
PIN_HI
BSF STATUS,RP0
BSF TRIS_DQ ;SET DATA AS INPUT WITH PULL UP!!!
BCF STATUS,RP0
RETURN
;------------------------------------------------------
OUT_BYTE
MOVWF O_BYTE
MOVLW .8
MOVWF COUNT
OUT_BYTE_1
RRF O_BYTE,F
BTFSS STATUS,C
GOTO OUT_0
GOTO OUT_1
OUT_BYTE_2
DECFSZ COUNT,F
GOTO OUT_BYTE_1
RETURN
OUT_0
CALL PIN_LO
MOVLW .6 ;60US DELAY
CALL DELAY_10US
CALL PIN_HI
GOTO OUT_BYTE_2
OUT_1
CALL PIN_LO ;MOMENTARY _ LONGISH!
CALL PIN_HI
MOVLW .6 ;60US DELAY
CALL DELAY_10US
GOTO OUT_BYTE_2
;------------------------------------------------------
IN_BYTE
MOVLW .8
MOVWF COUNT
CLRF I_BYTE
IN_BYTE_1
CALL PIN_LO ;3US
NOP ;4US
CALL PIN_HI ;11US
NOP ;12US
BCF STATUS,C ;13US
BTFSC DQ ;14US SAMPLE NEAR END OF 15US
BSF STATUS,C
RRF I_BYTE,F ;ROTATES IN THE CARRY BIT... EITHER 1 OR ZERO DEPENDING ON THE BTFSC DQ INSTRUCTION
MOVLW .4 ;40US + EXTRAS _ MIN OF 45US
CALL DELAY_10US
DECFSZ COUNT,F
GOTO IN_BYTE_1
MOVF I_BYTE,W
RETURN
;------------------------------------------------------
WAIT_CONVERSION
;WAIT END OF CONVERSION WHILE ACTIVELEY POWERED
BCF DQ ;SET DATA PIN LOW ?? DO ONCE INITIALLY ??
BSF STATUS,RP0
BCF TRIS_DQ ;SET DATA PIN AS OUTPUT _ 0
NOP ;1US
BSF TRIS_DQ ;SET AS DATA AS INPUT WITH PULL UP!!!
BCF STATUS,RP0 ;3US
GOTO $+1 ;5US
GOTO $+1 ;7US
GOTO $+1 ;9US
GOTO $+1 ;11US
GOTO $+1 ;13US
BTFSC DQ ;14US SAMPLE NEAR END OF 15US
GOTO CONV_FINISHED
MOVLW .6 ;40US + EXTRAS _ MIN OF 45US
CALL DELAY_10US
GOTO WAIT_CONVERSION
CONV_FINISHED
MOVLW .4 ;40US + EXTRAS _ MIN OF 45US
CALL DELAY_10US
RETURN
;------------------------------------------------------
PASSIVE_WAIT_CONVERSION
;WAIT END OF CONVERSION WHILE PASSIVELEY POWERED
;ALSO WORKS WHILE POWERED
;MUST DRIVE DQ HIGH DURING CONVERSION
BSF DQ
BSF STATUS,RP0
BCF TRIS_DQ ;DRIVE HIGH
BCF STATUS,RP0
MOVLW .4 ;4 * ~0.2S = ~800MS
MOVWF COUNT
CALL DELAY
DECFSZ COUNT,F
GOTO $-2
BSF STATUS,RP0
BSF TRIS_DQ ;FLOAT HIGH
BCF STATUS,RP0
BCF DQ
RETURN
;------------------------------------------------------
DELAY
CLRF LOOP ; ~ 0.2S DELAY (~256 X 256 X 3 US)
CLRF LOOP1
ENCORE
DECFSZ LOOP,F
GOTO ENCORE
DECFSZ LOOP1,F
GOTO ENCORE
RETURN
;------------------------------------------------------
DELAY_10US
MOVWF LOOP1
DELAY_10US_1
NOP
NOP
NOP
NOP
NOP
NOP
NOP
DECFSZ LOOP1,F
GOTO DELAY_10US_1
RETURN
;*******************************************************************************************
RE_READ
CALL READ_SCRATCHPAD
BTFSS FLAGS,PRESENCE
GOTO NOT_PRESENT
BTFSC FLAGS,DS_ERROR
GOTO READ_ERROR
MOVF TEMP_MSB,F
BTFSS STATUS,Z
GOTO NEGATIVE
BCF STATUS,C
RRF TEMP_LSB,F
;TEMP_LSB IS DECIMAL TEMP
;PLUS 0.5 DEGREE IF C SET
return
NEGATIVE
;2'S COMPLIMENT NEGATIVE ROUTINE
NOT_PRESENT
;DS1820 NOT FOUND ROUTINE
READ_ERROR
;READ ERROR ROUTINE
GOTO $ ;TWIDDLE THUMBS.
convert
movf TEMP_LSB,w
movwf UNITS
movlw '0'
movwf TENS
DO10S
movlw .10
subwf UNITS,W
btfss STATUS,C
goto ADJUST
movwf UNITS
incf TENS,F
goto DO10S
ADJUST
movlw '0'
addwf UNITS,F
return
SEGGY
CALL GetBYTE
CALL SplitToTens
CALL DisplayDigits
;===========================================================
; Split number into tens and units
;===========================================================
; TEMP = input byte (0-99)
; TENS = tens digit
; UNITS = units digit
GetBYTE
movfw TEMP_LSB
movwf LSB_Sanitise
movfw TEMP_MSB
movwf MSB_Sanitise
; Inputs: byteA, byteB
; Output: byteC
; Step 1: Extract upper nibble of byteA to lower nibble
SWAPF LSB_Sanitise, W
ANDLW 0x0F ;mask the first 4 bits, just need the last 4 after the nibble swap above
MOVWF temp
; Step 2: Extract lower nibble of byteB to upper nibble
;movfw MSB_Sanitise, W
SWAPF MSB_Sanitise, W
ANDLW 0x70 ;mask last 5 bits just need the first 3 after the nibble swap above
MOVWF MSB_Sanitise
; Step 3: Combine
MOVFW MSB_Sanitise
IORWF temp, W
MOVWF CombinedByte ; combined the upper nibble ofr msb with the lower nibble
;of lsb to get msb_lsb like this
return
SplitToTens
;movlw b'00100001'
;movwf CombinedByte ;--- Test if 33 works for instance during split
; --- Start of conversion subroutine ---
CONVERT_TEN_UNIT:
clrf TENS_AGAIN ; Initialize tens counter to zero
movf CombinedByte, W ; Load the number to convert into WREG
movwf UNITS_AGAIN ; Use UNITS_DIGIT as a temporary variable
LOOP_SUBTRACT_TEN:
movlw d'10' ; Load 10 into WREG
subwf UNITS_AGAIN, F ; Subtract 10 from UNITS_DIGIT
btfss STATUS, C ; Skip the next instruction if C flag is set (no borrow)
goto END_LOOP_SUBTRACT ; Jump if borrow occurred (result is negative)
incf TENS_AGAIN, F ; Increment the tens counter
goto LOOP_SUBTRACT_TEN ; Repeat the subtraction
END_LOOP_SUBTRACT:
movlw d'10' ; Load 10 into WREG
addwf UNITS_AGAIN, F ; Add 10 back to restore the remainder
return ; Return from the subroutine
; --- End of conversion subroutine ---
;===========================================================
; Display both digits (multiplex) USING TRANSISTOR AS A ---- HIGH SIDE SWITCH -----. ie when io pin is high, display is off. I think the display has potentially switched digits in the wiring compared to the old one
;===========================================================
DisplayDigits:
movlw 0x1E
movwf FILE1
LOOPY1 movlw 0x03
movwf FILE2
LOOPY2 movlw 0x03
movwf FILE3
LOOPY3
;---- Tens (left) ----
MOVF TENS_AGAIN,W
CALL DigitToSeg
MOVWF PORTB
BSF PORTA,2 ; enable tens (RA2)
BCF PORTA,1 ; disable units (RA1)
Call Delayswitch
;BCF PORTA,2 old one to turn off tens
BSF PORTA,1 ; turn off tens using new transistor
;---- Units (right) ----
MOVF UNITS_AGAIN,W
CALL DigitToSeg
MOVWF PORTB
BSF PORTA,1 ; enable units (RA1)
BCF PORTA,2 ; disable tens (RA2)
Call Delayswitch
;BCF PORTA,1 old one; turn off units
BSF PORTA,2 ; turn off units using the transistor
decfsz FILE3, f
goto LOOPY3
decfsz FILE2, f
goto LOOPY2
decfsz FILE1, f
goto LOOPY1
goto carryon
Delayswitch movlw d'10' ;delay 250 ms (4 MHz clock)
movwf count1
d1 movlw 0xC7
movwf counta
movlw 0x01
movwf countb
Delay_0
decfsz counta, f
goto $+2
decfsz countb, f
goto Delay_0
decfsz count1 ,f
goto d1
retlw 0x00
carryon
RETURN
END
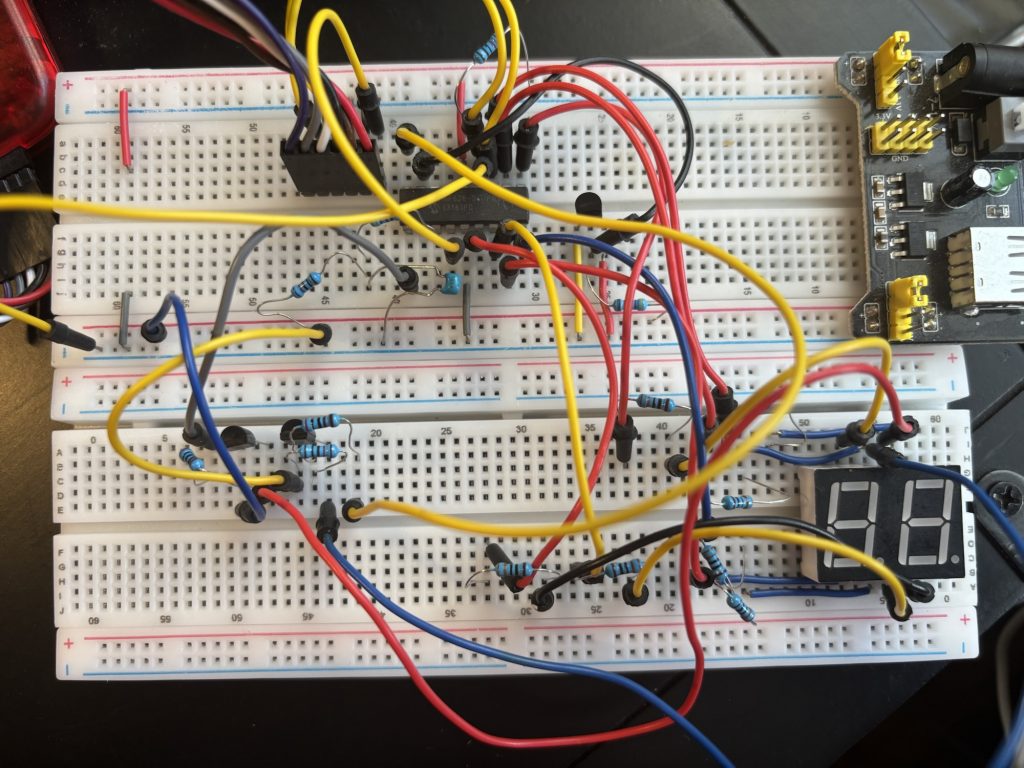
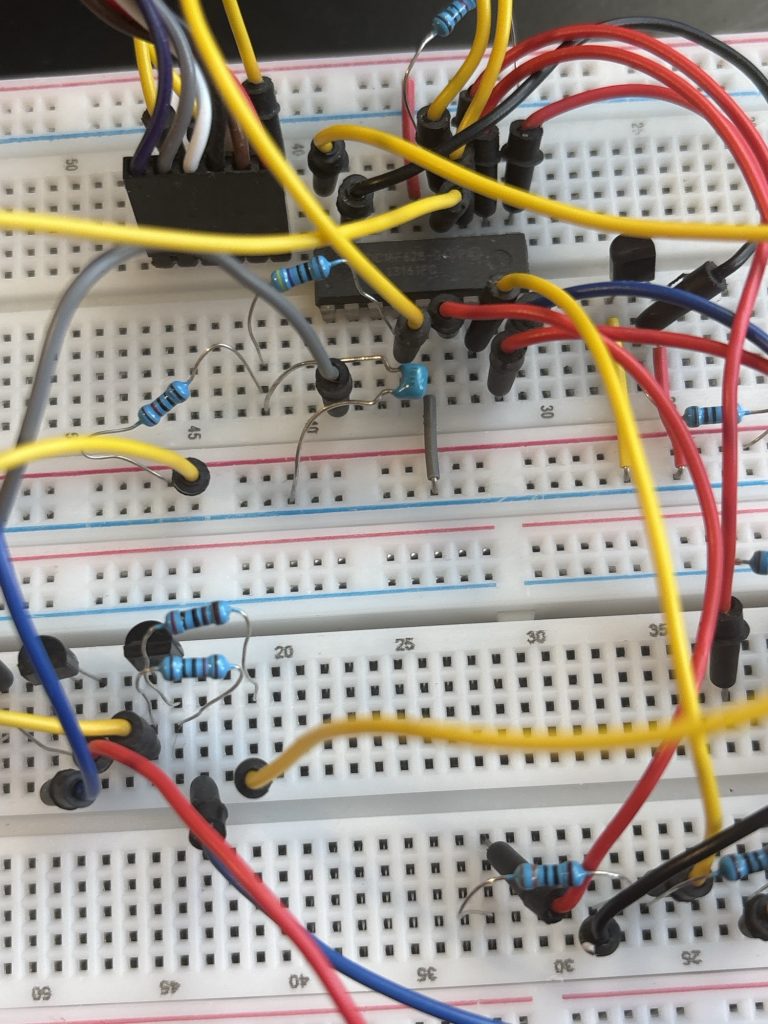
If you like, you can see the breadboard I used to prototype this for your reference:
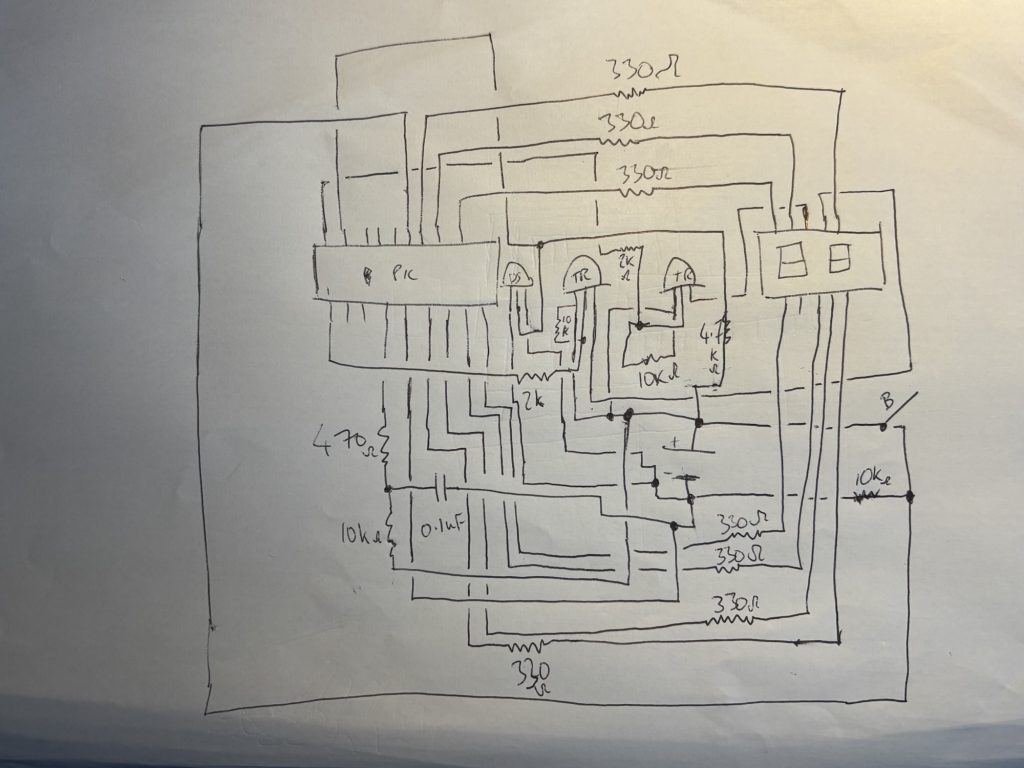
And this was the original schematic I drew out first for your reference:
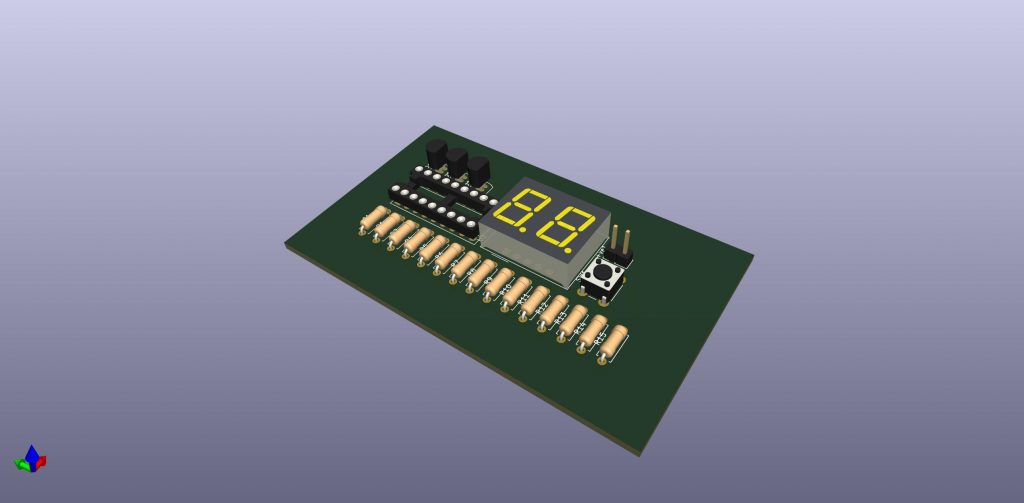
Now what you will need is the Gerber file to upload to JLCPCB. You may download it here:
All you do is go to https://jlcpcb.com, register for an account then hit “Order Now” at the top. Upload the Gerber file and leave all the other settings the same (i.e quantity 5, 2 layer, etc etc…) They will manufacture it for you and can send it to you within 10 days anywhere in the World for just £3 for 5 PCB’s, that’s 5 TINY-Therms, Bargain! All you’ll need to do then is solder the components onto the board, attach the battery pack of 3AAA batteries, then fire it up!
Enjoy!
Disclaimer Notice: This is an educational tutorial only and I will not accept any responsibility for damage or harm to property and/or persons as a result of you following and building this tutorial project. You are responsible for your own safety and performing any safety tests if used commercially. Ideally we recommend this for use only in personal/hobby projects.
This is an educational tutorial for personal use only. You must ensure you conduct the appropriate safety tests. But as an example, uses for this could include:
Industrial systems, consumer products, systems which are sensitive thermally, thermostatic controls, and thermometers, monitor various environments and machinery, power plants, and manufacturing, weather stations and home automation systems, measure temperature in solids, liquids or gases, Laboratories, Diagnostic labs, Dairy Industries, Domestic or industrial refrigerator temperature monitoring, baby thermometer, HVAC, automotive, research and quality control, adult thermometer, room temperature monitoring, outside temperature logger, industrial and consumer goods/products, wireless temperature monitor, LCD/LED screen thermometer, temperature logger, farming, agriculture, office, home, manufactured goods, electronics engineering, embedded systems, integrated products, digital products, physical products, projects, end products, consumer goods, pcb design, printed circuit boards, plastic enclosures, remote temperature monitoring, motors, surface plates, home appliances, computers, industrial equipment, warning electrical radiators, exhaust gas monitoring on cars, food production, 3d printed chocolates, alcohol breathalyser, transit, hvac, power and utilities, calibration instrumentation, heat exchangers, heating cooling systems, energy, red sensor, etc thermistor, rtd sensors,
PIC16F628 assembly PIC assembly language tutorial PIC microcontroller vs Arduino PIC vs ESP32 DS18B20 PIC code 1-Wire protocol PIC PIC16F628 thermometer project PIC assembly firmware PIC microcontroller efficiency Why use PIC microcontrollers
cycle-accurate timing deterministic microcontroller code low-level embedded programming bare-metal programming PIC 1-Wire timing accuracy microcontroller power consumption interrupt-driven temperature reading embedded systems optimisation minimal instruction cycles lightweight firmware design
Arduino overhead Arduino timing limitations ESP32 FreeRTOS overhead Arduino digitalWrite speed ESP32 latency issues microcontroller bloatware embedded systems performance comparison
“How to read a DS18B20 temperature sensor using PIC assembly” “Why PIC assembly is more efficient than Arduino” “PIC16F628 temperature sensor project with code” “Best microcontroller for simple temperature projects” “Cycle accurate 1-Wire code for PIC microcontrollers” “How to bit-bang 1-Wire in PIC assembly” “PIC16F628 DS18B20 wiring and schematic” “Minimalist microcontroller temperature monitor” “Bare metal programming vs Arduino libraries” “Why my Arduino DS18B20 readings are unstable” “Optimised DS18B20 firmware for 20 MHz PIC” “How to create a reliable digital thermometer without Arduino” “Understanding PIC assembly timing for sensors”
Domestic Purpose, Check the temperature of the water before bathing, to check the temperature of food items for cooking, to measure the temperature of grill stands, ovens, and other heating appliances.
Laboratory Purpose
To check the temperature of a solution.
To check the room temperature or atmospheric temperature to carry out experiments.
Industrial Purpose
To measure the temperature of the inner and outer surfaces of the walls.
Food industries use them to monitor the temperature of food items during various stages of preparation. Especially in the baking and cooking industries, they are very useful. By taking the right temperature, it is possible to achieve the desired temperature where the microorganisms do not multiply.
© Copywrite ODONO DESIGN 2023
DISCLAIMER
This is an untested project. This is for hobby and personal use only. We do not allow commercial use of this tutorial (ie selling it in an end product, but if you are making this for commercial purposes, YOU are responsible for all CE, FCC and safety testing according to your jurisdiction. We will not be held responsible for any fire, damage or injury caused by this project.
COPYRIGHT AND TERMS OF USAGE (LISCENSE)
You are free to use this file for personal, hobby or educational purposes only. No commercial use of this project is permitted. None of the content on this webpage (code and hardware designs) may be plagiarised to other websites. Failure to comply will result in legal action. Thank you.
This webpage is Copyright by Patrick O’Donoghue 2024. Temperature Monitor by Patrick O’Donoghue is licensed under CC BY-NC-ND 4.0